BMW 主动定速巡航控制系统解析与操作说明
BMWCHE/2015-10-29/ 分类:技术解析/阅读:
在车流密集的情况下和堵车情况下,具有停车和起步功能的主动定速巡航控制(ACC)系统能够为驾驶员提供帮助, 提高驾驶舒适性。 ...
(一)概述
在车流密集的情况下和堵车情况下,具有停车和起步功能的主动定速巡航控制(ACC)系统能够为驾驶员提供帮助, 提高驾驶舒适性。 此外,该系统可在高速至车辆静止的车速范围内发挥作用, 对车距和车速进行自动调节。 主动定速巡航控制系统见图1。
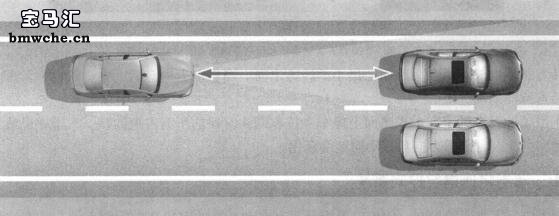
图1 主动定速巡航控制系统
当前方没有车辆时, 主动定速巡航控制系统保持车速恒定。 当 ACC传感器识别到自身车道前方有缓慢行驶车辆时, 主动定速巡航控制系统将激活车距调节功能, 这样反复加速和制动的工作由主动定速巡航控制系统承担, 并且实现精确控制 。主动定速巡航控制系统的车距调节功能见图2。
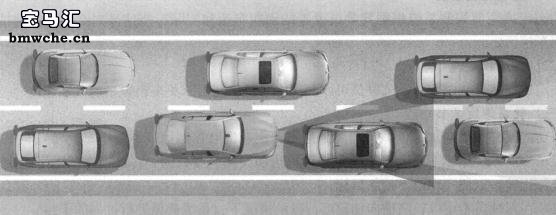
图2 主动定速巡航控制系统的车距调节功能
必要时主动定速巡航控制系统可以使车辆完全停住。如果前方车辆重新开始移动,系统就会发出提示信号。驾驶员必须对提示信息进行确认才能重新起步。只有在停车时间很短的情况下,系统才会白动完成起步过程。
因此, 具有停车和起步功能的主动定速巡航控制系统, 不仅可以在车流密集的情况下为驾驶员提供支持, 而且还能在堵车情况下为驾驶员提供支持, 但是该系统不适合在有十字路口或红绿灯的市区使用。 主动定速巡航控制系统的部件见图3 。
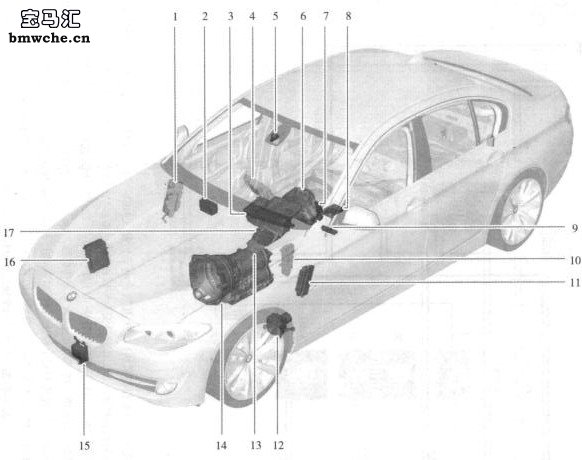
1.接线盒(接线盒电子装置和前部配电盒) 2.碰撞和安全模块
3.车辆信息计算机 4.中央信息显示屏
5.暗雨/光照/水雾传感器 6.仪表板
7.转向柱开关中心 8.集成式底盘管理控制模块
3.车辆信息计算机 4.中央信息显示屏
5.暗雨/光照/水雾传感器 6.仪表板
7.转向柱开关中心 8.集成式底盘管理控制模块
9.驾驶员辅助系统操作单元 10.中央网关控制模块
11.脚部空间模块 12.动态稳定控制模块
13.便捷登车及启动系统控制模块 14.自动变速器控制模块
15.ACC传感器 16.发动机控制模块 17.平视显示器
图3 主动定速巡航控制系统的部件
11.脚部空间模块 12.动态稳定控制模块
13.便捷登车及启动系统控制模块 14.自动变速器控制模块
15.ACC传感器 16.发动机控制模块 17.平视显示器
图3 主动定速巡航控制系统的部件
主动定速巡航控制系统电路图见图4。
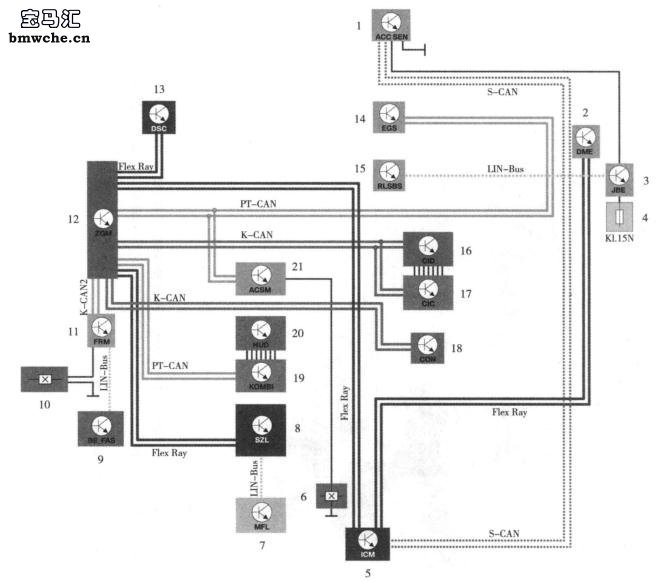
1. ACC传感器 2.发动机控制模块(DME控制模块)
3.接线盒电子装置(JBE) 4.前部配电盒内的 ACC传感器保险丝
3.接线盒电子装置(JBE) 4.前部配电盒内的 ACC传感器保险丝
5.集成式底盘管理控制模块(ICM控制模块) 6.驾驶员安全带锁扣触点
7.多功能方向盘 8.转向柱开关中心
9.驾驶员辅助系统操作单元 10.驾驶员车门触点
11.脚部空间模块(FRM模块) 12.中央网关控制模块
13.动态稳定控制模块(DSC控制模块) 14.自动变速器控制模块
15.晴雨/光照/水雾传感器 16.中央信息显示屏
17.车辆信息计算机 18.控制器 19.仪表板 20.平视显示屏
21.碰撞和安全模块(ACSM模块) FlexRay.快速预定容错总线 K-CAN.车身总线K-CAN2.车身总线2 Kl. l5N. l5N号电源 LIN-Bus.LIN总线 PT-CAN.动力总线 S-CAN.传感器总线
7.多功能方向盘 8.转向柱开关中心
9.驾驶员辅助系统操作单元 10.驾驶员车门触点
11.脚部空间模块(FRM模块) 12.中央网关控制模块
13.动态稳定控制模块(DSC控制模块) 14.自动变速器控制模块
15.晴雨/光照/水雾传感器 16.中央信息显示屏
17.车辆信息计算机 18.控制器 19.仪表板 20.平视显示屏
21.碰撞和安全模块(ACSM模块) FlexRay.快速预定容错总线 K-CAN.车身总线K-CAN2.车身总线2 Kl. l5N. l5N号电源 LIN-Bus.LIN总线 PT-CAN.动力总线 S-CAN.传感器总线
图4 主动定速巡航控制系统电路图
(二) ACC传感器
1、结构及工作原理
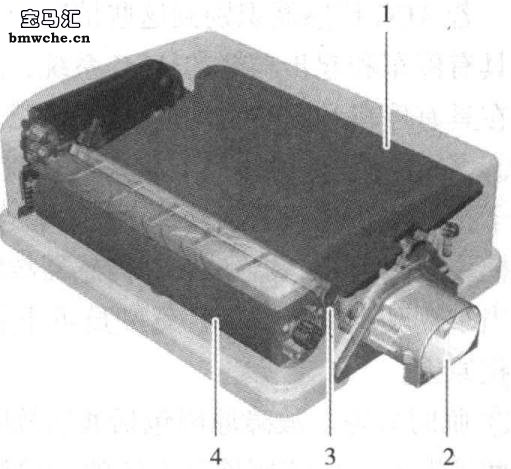
ACC传感器是雷达传感器,它利用内部电子或机械电子装置进行近距离和远距离探测。该传感器发射电磁波束,发射频率为76 ~ 77GHz,同时接收和分析物体的反射波,这样可以获得传感器前方的物体信息,其中包括大小、 距离以及由此计算出的速度。 ACC传感器见图5 。
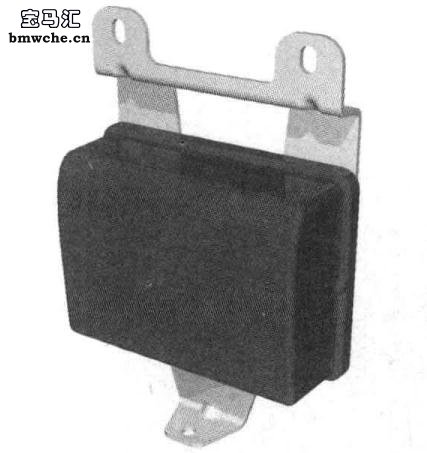
图5 ACC传感器
该传感器位于前端面板可拆卸格栅后方,见图6。
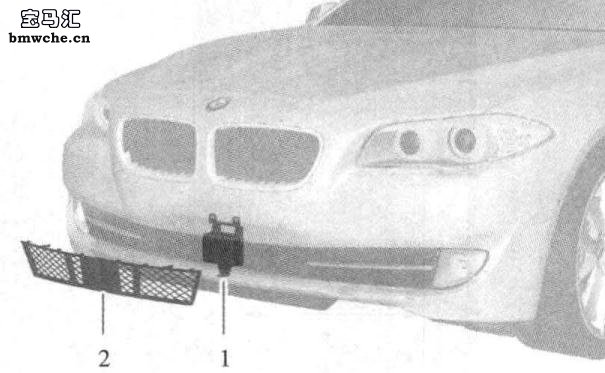
1. ACC传感器 2.可拆卸格栅
图6 ACC传感器安装位量
ACC传感器内部装有一个恒动滚轮。该滚轮带有不同形式滚花纹,可根据探测区域发射出不同特性的电磁波,因此滚轮每转一圈都可进行近距离和远距离探测 。 滚轮利用一个无电刷式电动机实现滚动,转速可达900r/min。由于只有在达到该转速后 ACC传感器才能正常工作,因此在低温情况下可能需要一定时间才能实现探测功能。波束通过波导管引导并反射在透反层上。ACC 传感器的波束反射原理见图 7 。
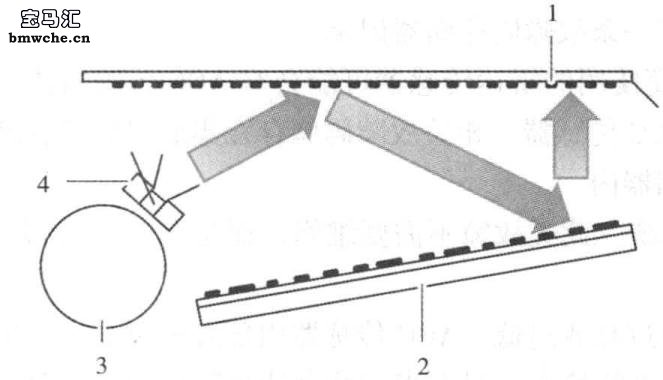
1.透反层 2.反射镜 3.滚轮 4.波导管(天线)
图7 ACC传感器的波東反射原理
波束照射到反射镜上后进行相位旋转并反射,然后穿过透反层离开売体 。 当波束遇到物体时被物体反射并沿相反方向返回 ACC传感器。波导管接收并测量波束,电子分析装置对波束进行分析并通过 CAN 总线将识别到的物体信息发送至集成式底盘管理控制模块。ACC传感器结构见图 8。
1.反射镜 2.插头 3.波导管(天线) 4.滚轮
图8 ACC传感器结构
传感器盖板有一层透反层。 在特定角度下,透反层允许波束射入或射出 。 当角度较平时,透反层反射波束并将其引导至売体内的不同部件上。ACC传感器利用一个防水插头与传感器CAN总线、15N号电源线和接地线相连。
ACC传感器持续进行近距离和远距离扫描并将识别到的物体结合起来进行分析,计算出物体相对于本车的速度。如果 ACC传感器探测到物体后相关系统使车辆停住,那么 ACC传感器就会启用低功率运行模式。 如果车辆重新起步或自动起步功能被激活 (车速表的设置车速 LED 为绿色) ,那么 ACC传感器就会启用正常功率模式。 ACC传感器接收范围见图9。
ACC传感器持续进行近距离和远距离扫描并将识别到的物体结合起来进行分析,计算出物体相对于本车的速度。如果 ACC传感器探测到物体后相关系统使车辆停住,那么 ACC传感器就会启用低功率运行模式。 如果车辆重新起步或自动起步功能被激活 (车速表的设置车速 LED 为绿色) ,那么 ACC传感器就会启用正常功率模式。 ACC传感器接收范围见图9。
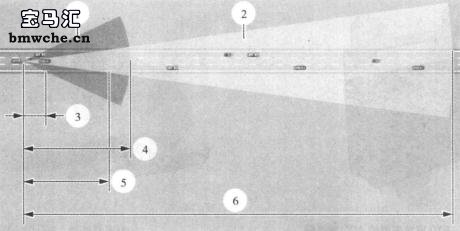
1.近距离探测 2.远距离探测
3.通过近距离探测方式在整个3条车道宽度范围内探测目标距离(约l0.5m)
4.近程雷达作用范围(约50m)
5.通过远距离探测方式在整个3条车道宽度范围内探测目标距离(约40m)
6.远程雷达作用范围(约200m)
3.通过近距离探测方式在整个3条车道宽度范围内探测目标距离(约l0.5m)
4.近程雷达作用范围(约50m)
5.通过远距离探测方式在整个3条车道宽度范围内探测目标距离(约40m)
6.远程雷达作用范围(约200m)
图9 ACC传感器接收范围
2、维修与服务
对车辆前部区域进行维修时要特别小心。如果保险杠变形或 ACC传感器挡板有划痕,那么传感器功能会受到影响。
(1)故障。ACC传感器内部装有故障码存储器。当进行诊断时,可以通过集成式底盘管理系统读取该故障码存储器的信息 。有故障的 ACC传感器必须更换,然后进行校准 。下面介绍ACC传感器常见故障。
① ACC传感器有污物。如果 ACC传感器天线上有冰、雪或污泥,那么该传感器无法正常工作。若 ACC传感器识别到这些情况,将向集成式底盘管理控制模块发送一个相应信号,随即停用具有停车和起步功能的ACC系统,通过一条专用检查控制信息提示驾驶员注意这种特殊情况 。在具有停车和起步功能的 ACC传感器内保存一条故障码存储器记录 。
② 雷达信号受到外部干扰 。其他汽车制造商使用的雷达传感器可能会对 Acc 传感器信号造成干扰。当系统识别到这种干扰时就会停用 ACC传感器,相关故障码储存在集成式底盘管理控制模块故障码存储器和 ACC传感器故障码存储器内 。
当车辆驶离干扰区后,驾驶员可重新启用系统。此类故障不需要维修,而是向客户说明外部干扰原因。
③临时故障。故障原因包括通信故障,电压过高或过低,ACC传感器内部温度过高。当出现这些情况时,应按照诊断系统的“检测计划”进行检査。只有当“检测计划”提出更换要求时,才能更换 ACC传感器。
④电子分析装置故障。若 ACC传感器内部的电子分析装置损坏,则更换整个 Acc传感器。
⑤传感器失调。ACC传感器与集成式底盘管理系统的传感器相互配合,可识别出因发生事故(例如碰撞)而导致的传感器失调问题。当失调计算值超过某一个极限值时,ACC传感器将被关闭,故障码存储器记录故障原因 。排除故障时应遵守诊断系统相关说明和维修说明 。
(2)校准及试运行。当更换ACC传感器时,必须通过诊断系统进行试运行。在试运行期间将安装位置数据输入新的 ACC传感器内,在整个过程中必须对该传感器进行调节。在发生事故但未造成传感器损坏的情况下,可能也需要对 ACC传感器进行调节。ACC传感器校准方法见图10。
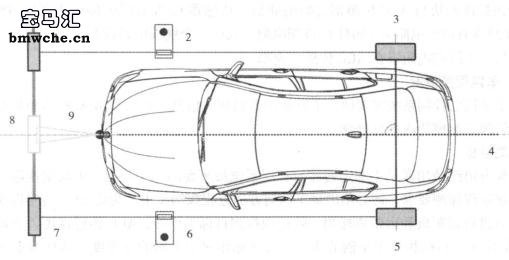
1.右侧反射镜 2.右侧开槽挡板 3.右侧激光发射器
4.车辆纵轴 5.左侧激光发射器
4.车辆纵轴 5.左侧激光发射器
6.左側开槽挡板 7.左侧反光镜
8.调节镜 9.ACC传感器
8.调节镜 9.ACC传感器
图10 ACC传感器校准方法
ACC传感器校准及试运行步骤如下:
①确保按照维修说明进行测量工作。
②将车辆停放在水平地面上
③连接诊断系统。
④将用于调节 ACC传感器的反射镜放在正确位置。
⑤按照“诊断计划”进行调节。
⑥ 结束调节过程并删除故障码。无需对 Acc传感器进行机械调节,仅需调整传感器売体,微调工作由传感器内部的执行元件来完成。
(三) 集成式底盘管理控制模块
集成式底盘管理控制模块安装在中控台内部、 碰撞和安全模块后部,这样可使该控制模块位于车辆重心附近,这个位置对行驶动态管理系统来说比较理想。车身上的固定点经过精确定位,在车辆制造时经过测量,不得使用其他固定点来替代。
集成式底盘管理控制模块分析传感器数据和车辆数值,执行纵向和横向调节功能。此外,该控制模块是定速巡航控制系统、 主动定速巡航控制系统和碰撞警告系统的主控模块。Fl0使用两种不同型号的集成式底盘管理控制模块。基本型控制模块用于不带有主动定速
巡航控制系统的车辆,高级型控制模块用于带有主动定速巡航控制系统或主动转向系统的车辆。高级型控制模块与基本型控制模块有以下不同之处:
(1) 高级型控制模块微处理器较大 (用于运算主动定速巡航控制系统的数据)。(2) 高级型控制模块提供横向加速度和偏转率的冗余传感器数据。集成式底盘管理控制模块有一个54针线束插头,用于连接供电导线、 总线、 传感器和执行机构。
Flex Ray总线与集成式底盘管理控制模块相连,该总线由中央网关控制模块引出并连接至发动机控制模块。 由于集成式底盘管理控制模块不是 Flex Ray总线终止节点,因此没有用于Flex Ray总线的终端电阻。
除 Flex Ray总线外,集成式底盘管理控制模块还与传感器 CAN总线相连。传感器 CAN总线仅用于该控制模块与 ACC传感器之间的通信。传感器 CAN总线的传输速度为500kbit/s。传感器 CAN总线有两个电阻为l20a的终端电阻,其中一个终端电阻设在集成式底盘管理控制模块内部,另一个终端电阻设在 ACC传感器内部。
(四) 车辆周围情况
主动定速巡航控制系统需要前方道路使用者的相关信息,该信息由 ACC传感器获得并在集成式底盘管理控制模块内进行处理。
1、探测目标
探测前方道路使用者是主动定速巡航控制系统最重要的一项功能 。主动定速巡航控制系统不仅要满足远程探测要求,还必须满足车辆前方的近程探测要求。为此 ACC传感器通过雷达波在车辆前方进行近距离和远距离探测 。除这项探测目标工作外,ACC传感器还负责确定目标的χ轴和 y轴位置、 目标相对于车辆的速度以及目标相对于车辆的加速度。这些数据用于调节车距。
2、处理目标数据
ACC传感器对目标数据和移动参数进行初步处理 。处理过的数据由集成式底盘管理控制模块进行再次处理,对 Acc传感器的目标数据进行合并,因为部分近距离和远距离探测区域有重叠部分。对合并后的目标数据进行进一步处理,然后就可以用于车距调节功能。
3、目标评估
为了确定以哪个目标作为基准,系统为每个目标都设定评估等级,设定标准如下:
( l) 目标相对于车辆的位置和运动 。目标离车辆越近和/或目标向车辆移动的速度越快,评估等级就越高。
(2) 目标停留在自身车道内 。AcC传感器无法识别实际车道或车道上的标记。用于偏离车道警告系统的摄像机也无法将相关信息提供给主动定速巡航控制系统。
因此,当车辆行驶时,主动定速巡航控制系统只能根据本车移动的参数和探测的静止目标参数来推算向前行驶的大致车道路线 。当车辆静止时,系统主要根据转向角传感器信号做出判断。也就是说,当车辆静止时转动方向盘,系统推算出的车道路线会相应变化。
(五)调节功能
1、定速控制功能
主动定速巡航控制系统的定速控制功能原理与动态定速巡航控制系统相同。
2、车距调节功能
车距调节功能是主动定速巡航控制系统的核心功能。车距调节功能软件集成在集成式底盘管理控制模块内部 。利用方向盘上的两个按钮可以选择预期车距 (4个挡位) 。
3、转弯速度调节功能
主动定速巡航控制系统的转弯速度调节功能是以动态定速巡航控制系统的相关功能为基础的,在此基础上增加了 ACC传感器的侧面探测范围功能。如果在转弯行驶时目标丢失,那么系统会等待一定时间,然后探测目标是否重新出现 (交替转弯) 。只有当目标不再出现时,车辆才会加速。
4、规定值优先级排序
相关参数需要进行优先级排序,以便系统执行车距调节功能。主动定速巡航控制系统的规定值优先级排序方式与动态定速巡航控制系统的基本相同,只是增加一项车距调节功能调节规定值。 .
5、干扰力评估
主动定速巡航控制系统的干扰力评估方式是以动态定速巡航控制系统为基础的。在此基础上进行了细节改进。当车辆低于30km/h行驶时,干扰力评估结果的不准确性明显高于高速行驶的评估结果。
6、控制执行机构
除车辆静止情况外,主动定速巡航控制系统的执行机构控制方式与动态定速巡航控制系统完全相同。当主动定速巡航控制系统进行制动干预时,制动灯将点亮。
(六)操作和显示
1.启用和停用
主动定速巡航控制系统的启用和停用方式与动态定速巡航控制系统基本相同。只要主动定速巡航控制系统识别到前方车辆,无论在行驶期间,还是在车辆静止期间,驾驶员都能启用该系统。 此时驾驶员必须踩下制动踏板并操作相关设备 (如复位按钮) ,同时必须满足以下条件:
(1)系好安全带且关好车门。
(2)挂入行驶挡位D。
(3)发动机运行。
(4)未启用驻车制动器。
(5) ACC传感器进入准备就绪状态。
(6) 未识别出系统故障。
短促按压相关按钮,可以增大或减小车距设置值。共有4个车距挡位供驾驶员使用。仪表板显示所选的车距挡位符号 (设置车速和车距显示条) 和提示文字信息。显示的时间约为 3s。 此后每次重新操作相关按钮,显示内容就会出现3s。 平视显示屏也会显示 ACC信息。
2、更改预期车速
当主动定速巡航控制系统处于接通状态时,可以通过短促按压方向盘上的相关按钮来更改预期车速值。 即使在车辆静止状态下,也可以更改预期车速。预期车速的调节范围为30~ l80km/h。
3、更改预期车距
当主动定速巡航控制系统处于接通状态时,可以通过短促按压方向盘上的相关按钮来更改预期车距值。 有4个车距挡位供选择,所选车距值在仪表板内以显示条的形式显示出来。
在行驶期间更改预期车距,会立即感觉到车速变化,车辆通过稍稍加速或减速方式来调节车距。 在车辆静止状态下更改预期车距,不会导致车辆移动。在驾驶员超速控制期间,仪表板的车距显示条消失。
4、停车和起步
虽然在车距调节模式下可以使车速降至为 Okm/h (车辆静止) ,但还需要通过一些附加措施来控制停车和起步过程。这些措施由动力传动系统和制动器来完成,从而尽可能提高舒适性。在控制过程中,系统不允许车辆向后溜车。
5、驾驶员有离车意图时的系统反应
主动定速巡航控制系统控制 DSC液压系统,使车辆准确减速并保持静止状态。但在没有供电的情况下,DSC液压系统无法随时保持车辆静止所需的制动压力。电动机械式驻车制动器(EMF) 可在出现以下情况时使车辆保持静止:
(1) 动态稳定控制系统出现故障。
(2)驾驶员离开车辆c
(3)关闭发动机。当主动定速巡航控制系统根据总线信号识别出电动机械式驻车制动器进行驻车制动时,主动定速巡航控制系统将自动停用,车辆依靠电动机械式驻车制动器保持静止状态 。为了识别驾驶员的离车意图,主动定速巡航控制系统分析安全带锁扣触点 (驾驶员) 和车门触点(驾驶员车门)信号。在Fl0上不使用座椅占用识别装置(驾驶员座椅)信号。
(七)监控功能
(七)监控功能
集成式底盘管理控制模块通过相关总线检査所有子系统是否正常、所有输入信号是否有效以及控制模块自身的电子装置是否正常 。
当进行故障査询时,不仅要考虑到各个组件,还要考虑到总线网络的所有相关系统 。 如果出现相关故障,那么系统功能将被解除,仪表板显示相关检査控制信息 。
当进行故障査询时,不仅要考虑到各个组件,还要考虑到总线网络的所有相关系统 。 如果出现相关故障,那么系统功能将被解除,仪表板显示相关检査控制信息 。
网站声明 1、本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享。
2、本网站所提供的信息,只供参考之用,本网站不保证信息的准确性、有效性、及时性和完整性。
3、如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,bmw@bmwche.cn 我们会及时修改或删除。
2、本网站所提供的信息,只供参考之用,本网站不保证信息的准确性、有效性、及时性和完整性。
3、如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,bmw@bmwche.cn 我们会及时修改或删除。
TAG:
阅读: 下一篇:BMW 碰撞警告系统解析及注意事项 上一篇:BMW 环视系统解析与操作说明

推荐文章
Recommend article-

大BOSS来临!全新宝马X7的发动机和底盘技术解析
技术解析/阅读:6747 -

技术解析三缸发动机与四缸发动机的差距到底在哪
技术解析/阅读:1969 -

王位继承者 替代S55的全新S58直列6缸发动机解析
技术解析/阅读:10550 -

最强六缸汽油机!解读宝马X3 M、X4 M S58发动机
技术解析/阅读:1993 -

并不是为了装饰!宝马内侧大灯不亮的原因
技术解析/阅读:3168 -

动力再提升 宝马M2 3.0T发动机解析
技术解析/阅读:1415

热门文章
HOT NEWS